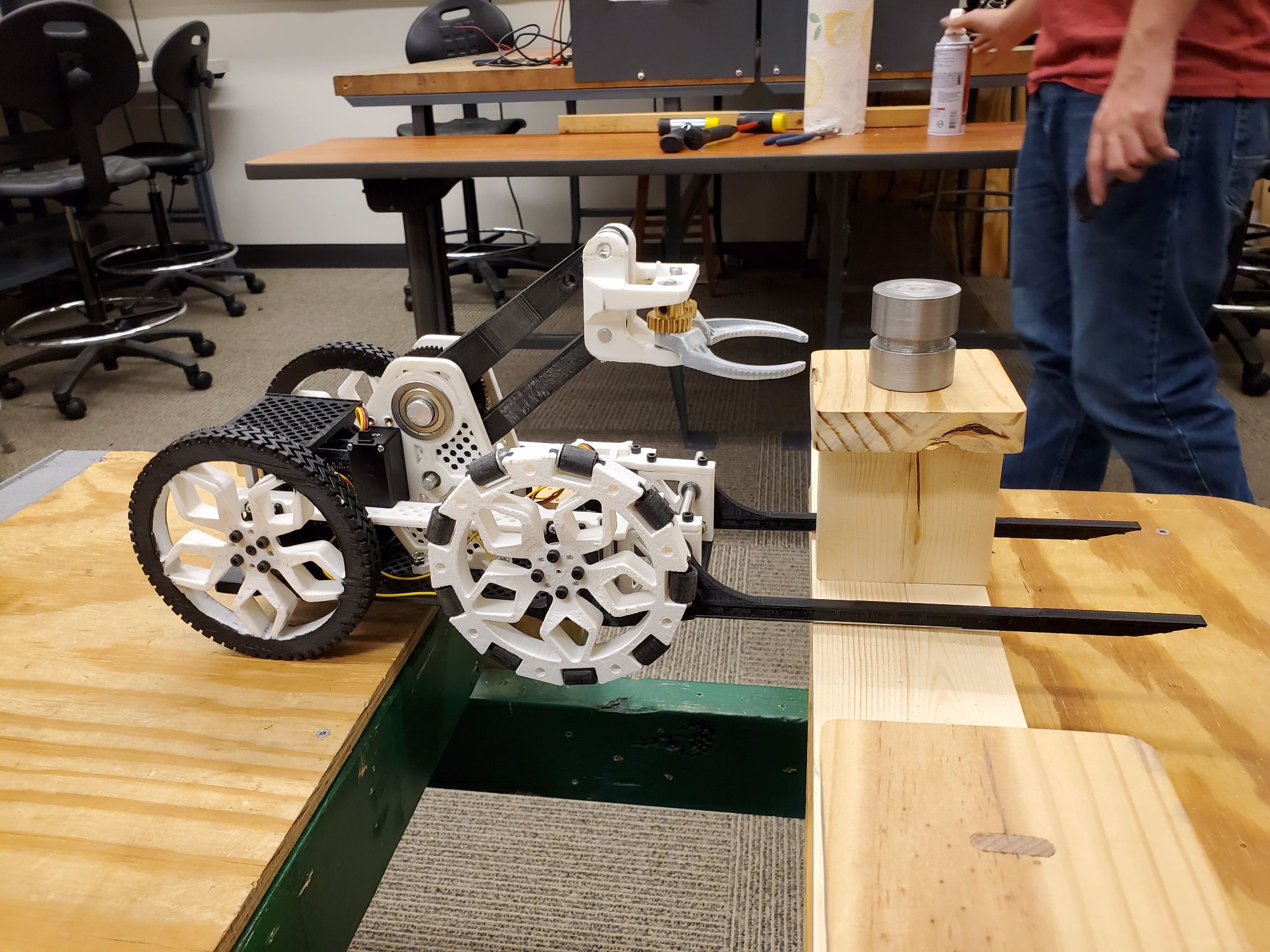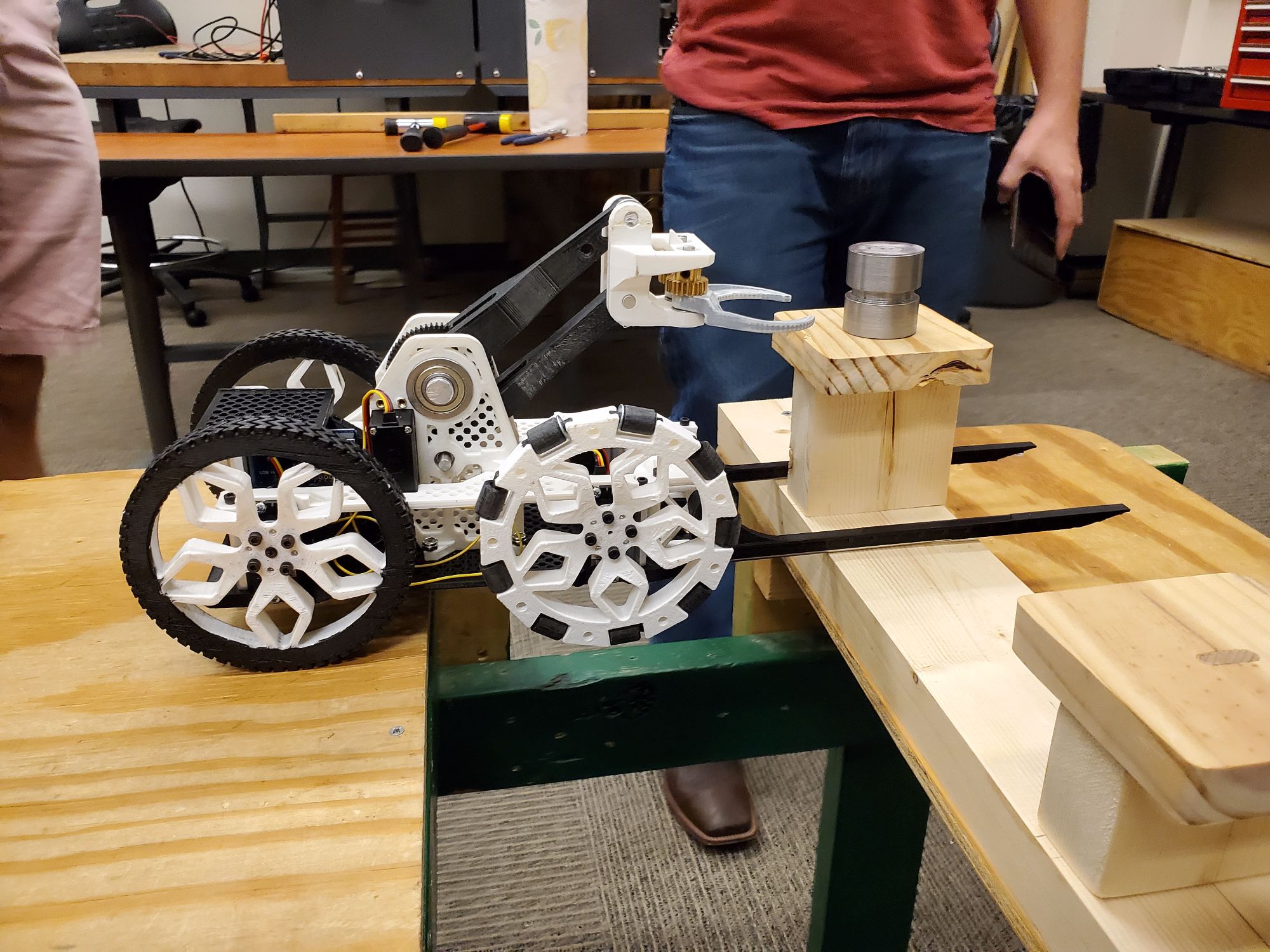

MEGR 3156 is a course where students are given a design challenge and compete with other teams at the end of the semester. The received challenge was to design a remote vehicle that could traverse an obstacle course, ascend an incline,
and transport an object across an 8” moat. The dimensions were restricted to 6” x 6” x 12” at the start and end of the run, but not restricted in between. Throughout the semester, students had to present a conceptual and final
design review before approval to begin manufacturing. Students had to consider the cost and weight of the design in addition to physical elements such as dynamic forces, stresses, fatigue, and mechanical advantage.
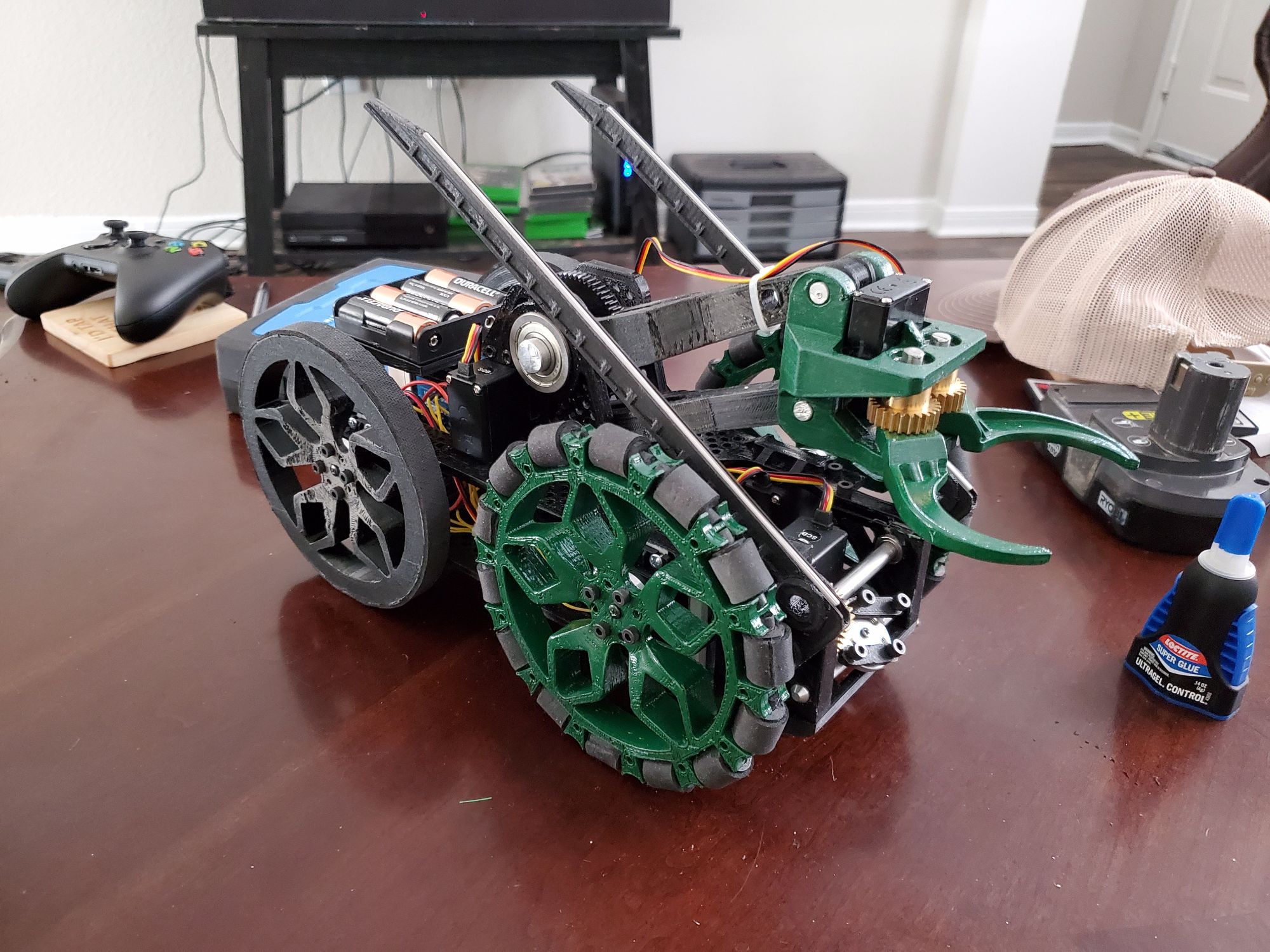
The robot was designed using Solid Works. 3D-printed parts make up most of the major components. This design choice was made because 3D printing enables rapid prototyping of complex parts while maintaining durability. With the unique
configuration of parts, ABS proved to be a strong enough material with a safety factor included in the calculations.
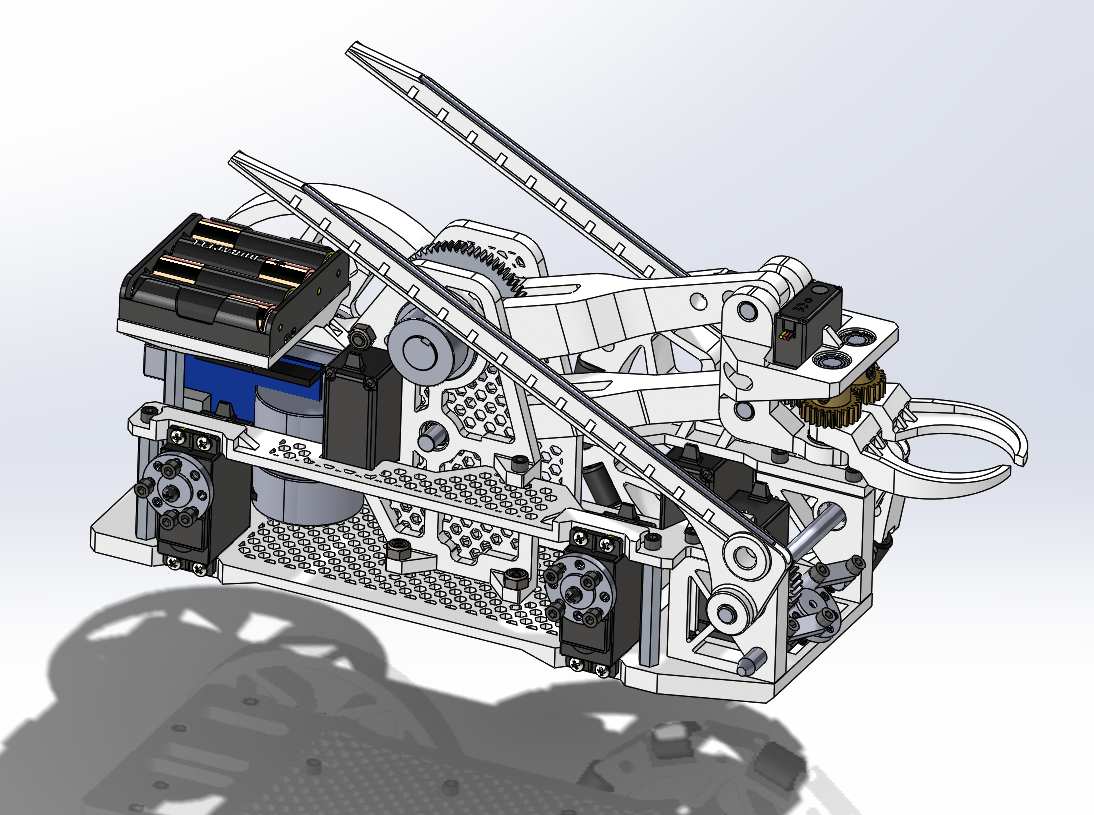
A lot of teams designed their robots to have a passive arm pivot across a gear with the claw at the end, but our approach was different. Where people wanted to stay behind the moat, we were willing to drive off it. This idea came from
watching a video of how concrete bridges were assembled with massive machines. The base was built similarly to how FPV drones are assembled which you can see from the double-layered body.